
特定整備制度が施行され、いよいよ本格的にエーミング作業をしていかなくてはいけません。
エーミング調整といってもメーカーや車種によって、準備する器具やターゲットの設置位置も様々になります。
しかしどのメーカーも同じような測定方法になりますので、基本をしっかり覚えてしまいましょう。
今回はTOYOTA車のフォワードレコグニッションカメラのエーミング作業のやり方を解説していきます。
ミリ波レーダー等のエーミングに関してはミリ波レーダーの調整方法とクリアランスソナーの測定方法【TOYOTA編】をご参照ください。
エーミングの作業方法【TOYOTA編】
エーミング作業の前に
どのメーカーでもレーザーやカメラの学習前には以下の準備が必要になります。
- タイヤの空気圧を正規に調整する
- フロントガラスを清掃する
- ターゲット探索範囲内に、コントラストの差が大きいもの(蛍光灯の配列、窓、光の反射物、車両の白いボデーと黒い窓または車室内の影など)がないこと
- ターゲット設置位置後方にコントラストの差が大きいものがある場合は、ターゲット背景を隠して調整を実施すること
※【コントラストの差】エーミング作業場は明るさを一定にしなければ、車両のカメラやレーダーがうまくターゲットを認識しません。
ですので作業時にはターゲットの背景を布なのでおおってください。
またターゲットに太陽光などの光が反射してしまっても同じですのでご注意ください。
車種によって変わってきますがトヨタのエーミング調整は一括認識と順次認識があります。
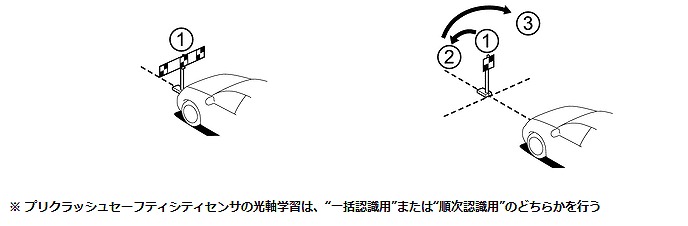
フォワードレコグニションカメラの光軸調整【順次認識】
まずはカメラ調整の方法を50系プリウスで解説していきます。
フロントガラスの上部にあるカメラになりますので、フロントガラスの交換や脱着時には学習もしくは調整が必要になります。
50系プリウスのエーミング作業は順次認識になります。
1 ターゲットの設置位置
1-1 エーミング作業の場所の確保と水平確認

● 車両前方に3mの間隔をあけます

● 水平器を使用して確認位置の水平を確認してください
1-2 ターゲット設置位置の割り出し
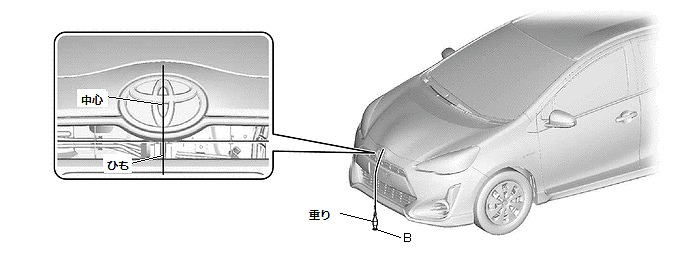
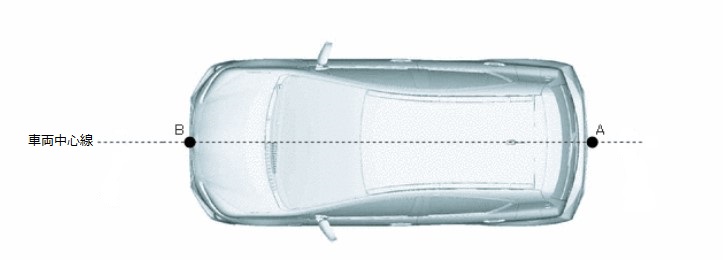
まずは車両の中心線を出していきます。

● 下げ降り錘を使って車両前方にマーク

● 後方も同じようにマークしてください
AとBを直線で結びそのまま車両前方に2300㎜ほど伸ばします。

Bから481㎜の位置にC、2151㎜の位置にDをマークします。
Cを中心に1000㎜の半円を描いてください。
Dからも1000㎜の半円を描き、交わったと位置が G と J になります。
※コンパスで円を描く要領です
次に G と J を結びます。
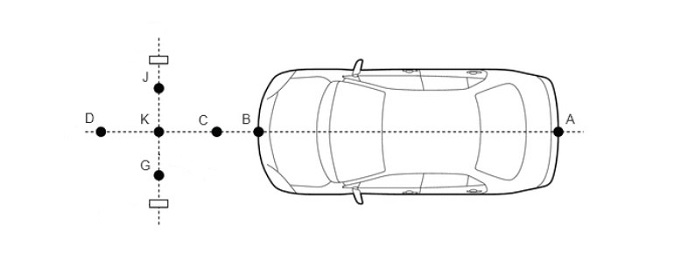
G、J線と車両中心線の交わる位置が K になり
このK、J、Gの位置がターゲットの設置位置になります。

カメラとターゲットの設置位置までが3000㎜
それぞれのターゲット位置の間隔が550㎜になっているか確認してください。
※許容範囲は±3㎜です
2 順次認識用のターゲット作成
次にターゲットの作成です。
ターゲットは購入しなくとも修理書から印刷できます。
車種やエーミングのやり方によってターゲットの大きさが変わってきますので注意してください。

こちらからも自由に印刷できますのご自由にどうぞ
一応、実物大で印刷していただければ今回使用する180㎜に合わせてあります。

上記の寸法に印刷できましたら、厚紙や段ボールなどに貼り付けます。
※許容範囲は±5㎜です

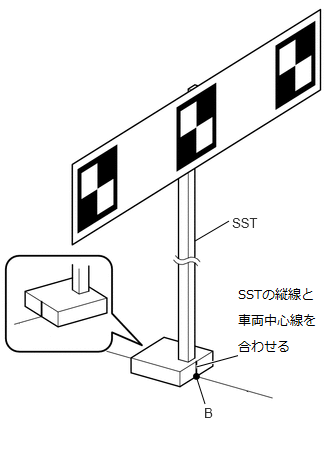
後はトヨタモビリティーパーツ(トヨタ部品共販)で購入できるSSTに取り付ければOKです。
特にSSTが必要ではありませんが、ミリ波レーダー用で必要になってきますのでそこまで高価ではないので購入しておいたほうがいいでしょう。
高さと水平さえ合っていればホワイトボードに貼り付けてもいいですし
変な話、工具箱(キャディー)でも大丈夫です。


● プリウスの場合高さは1350㎜になります。

ターゲット設置位置後方にコントラストの差が大きいものがある場合は、ターゲット背景を隠して調整を実施してください。
3 スキャンツールにてカメラ光軸調整
ここに関しましてはお持ちのスキャンツールで作業方法が違ってくるとは思いますが
おそらく大体同じだと思いますので大まかにご説明いたします。
まずはスキャンツールの使用は乗車せずに使用してください。
3-1 レコグニッションカメラ/ターゲット位置記憶
車両とスキャンツールを繋げましたら
【シャシー関係】の【前方認識カメラ】から【作業サポート】に進んでください。
そこの【カメラ・ターゲット位置記憶】を実行してください。
すると数値入力画面が出てくると思います。
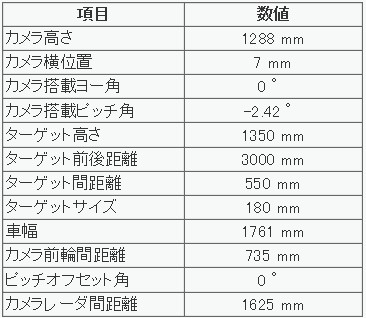
50系プリウスの場合はこんな感じの数字になります。
3-2 光軸学習
ターゲット位置記憶が完了したら
作成したターゲットをKの位置に設置してください。
【シャシー関係】の【前方認識カメラ】から【作業サポート】に進んで【光軸学習】を実行。
順次認識方式ですのでK→G→Jの順で光軸調整をしてください。
エラーがなければ完了になります。
プリクラッシュセーフティセンサの光軸学習【一括認識】
トヨタ車ではレコグニッションカメラの他にプリクラッシュセーフティセンサの採用もしています。
小型車などはこちらがメインで採用されている傾向ですね。
取り付けられている場所はレコグニッションカメラと同様でフロントガラスの上部です。
プリクラッシュセーフティセンサのエーミング作業は一括認識でやられることが多いです。
順次認識でもできるのですがターゲットをいちいち動かさなくて済みますので楽ですね。

こちらの方法はアクアを使ってご説明します。
1 ターゲット設置位置
1-1 エーミング作業の場所の確保と水平確認
一括認識の場合は水平確認位置も少なく済み、車両前方の間隔も少なく済みます。
1-2 ターゲット設置位置の割り出し
車両中心線の出し方はカメラの時と同様です。
● 下げ降り錘を使って車両前方にマーク

● 後方も同じようにマークしてください
一括認識のターゲットの位置はBになります。
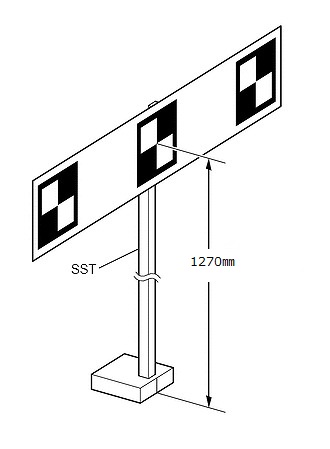
アクアの場合ターゲット中心の高さは1270㎜です。
2 一括認識用のターゲット作成
一括認識用のターゲット作成ですがとても簡単です。
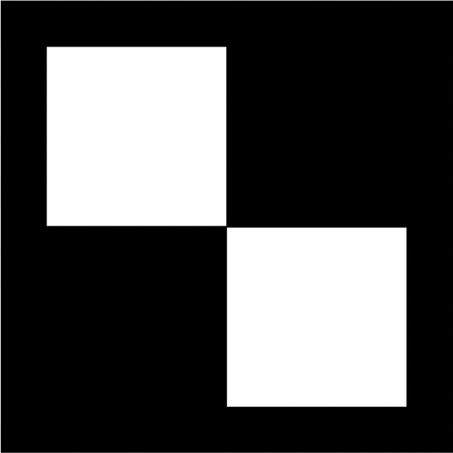
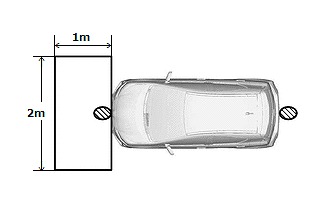
おなじみのターゲットを今度は120㎜の正方形になります。
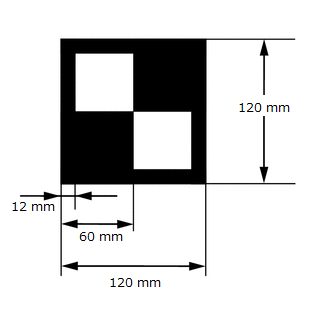
これを3枚コピーしてダンボールに等間隔で貼るだけです。
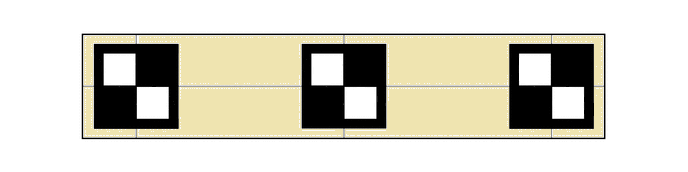
ダンボールのサイズとターゲットを貼る位置は下の図を参考にしてください
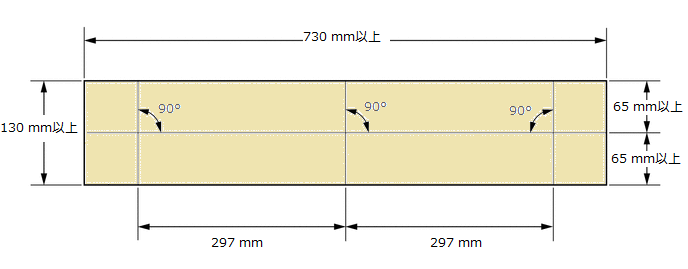
90度はしっかり図りませんとターゲットの歪みの原因にもなりますので
曲尺定規などを使いしっかり墨出ししましょう。
3 スキャンツールにてセンサー光軸学習
ターゲットを設置しましたらスキャンツールで光軸学習をするだけになります。
順次認識と同様にまずは【レコグニッションカメラ/ターゲット位置記憶】
ターゲットをBの位置に設置し【光軸学習】をして完了です
まとめ
TOYOTA車のカメラとプリクラッシュセーフティセンサーのエーミングに関してはターゲットさえ作成してしまえば簡単に作業できます。
一括認識は車両中心線を出してしまえば30分程で作業は完了してしまいます。
順次認識に関してはレーザー距離計とレーザー墨出し器さえあれば効率よくターゲットの設置位置が割り出すことができます。
 | 価格:3,900円 |
 | 5ライン グリーンレーザー墨出し器 SJ-G225 【KAPEO】 価格:12,699円 |
要はターゲットとカメラの距離を3000㎜に合わせてしまえばいいわけなので、デジタル距離計を使ってターゲット位置を割り出してしまうのです。もちろん車両中心線上で行わないといけません。
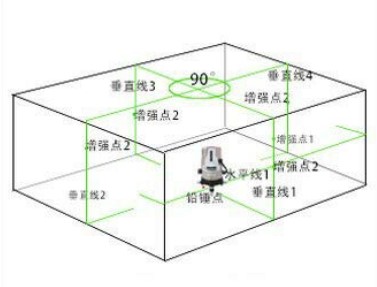
更にクロスラインレーザー墨出しを車両中心線上に設置すれば、ターゲット設置位置の2と3もすぐに割り出すことができます。


いかに要領よく作業し必要な物を安価で揃える事が効率アップに繋がるのではないでしょうか。